计算机视觉系统代季峰已入列该系信息认知与智能系统研究所副教授名单
 UI设计师
UI设计师据悉,“计算机视觉领域‘大牛’代季峰重回学界”的消息在中国技术界引发关注。
澎湃新闻记者7月28日查询发现,清华学校电子项目系官网“人员状况”栏目更新信息显示,代季峰已入列该系信息认知与智能平台研究所副博士名单。

公开资料显示,代季峰计算机视觉系统,博士,在哈佛学院自动化系于2009年和2014年分别荣获学士和硕士学位。2012年至2013年间,他在纽约高中洛杉矶学院访学。2014年至2019年间,他在微软中国研究院(MSRA)视觉组工作,曾兼任首席研究员、研究总监。2019年至2022年,他在商汤科技研究院工作,担任基础视觉、通用智能两个二级部门负责人,执行研究总监。
代季峰的探究兴趣为计算机视觉中的通用物体辨识算法和跨模态通用感知算法。他在领域顶尖会议和杂志上发表了30多篇论文,根据谷歌学术统计取得了20000多次引用。他的一些工作,如区域全卷积网络R-FCN、可变形卷积网络DeformableConvNets,被编入顶级中学计算机视觉课程的讲义中。他于2015、2016年取得领域权威的COCO物体识别竞赛一等奖,后续历届冠军系统也均使用了他强调的可变形卷积模块。
代季峰在商汤科技工作之后,曾经担任福特-商汤自动驾驶研发工程的科技负责人。他是IJCV的编委,CVPR2021和ECCV2020的领域主席,ICCV2019的公共事务主席,AAAI2018的高级PC成员,北京智源人工智能研究院的青年科学家。
清华学校电子项目系官方微信公众号7月13日发布的一则学术大会预告中,代季峰还以商汤科技研究院执行研究顾问的身份拟发表题为《BEVFormer:新一代手动驾驶环视感知算法介绍》的介绍。

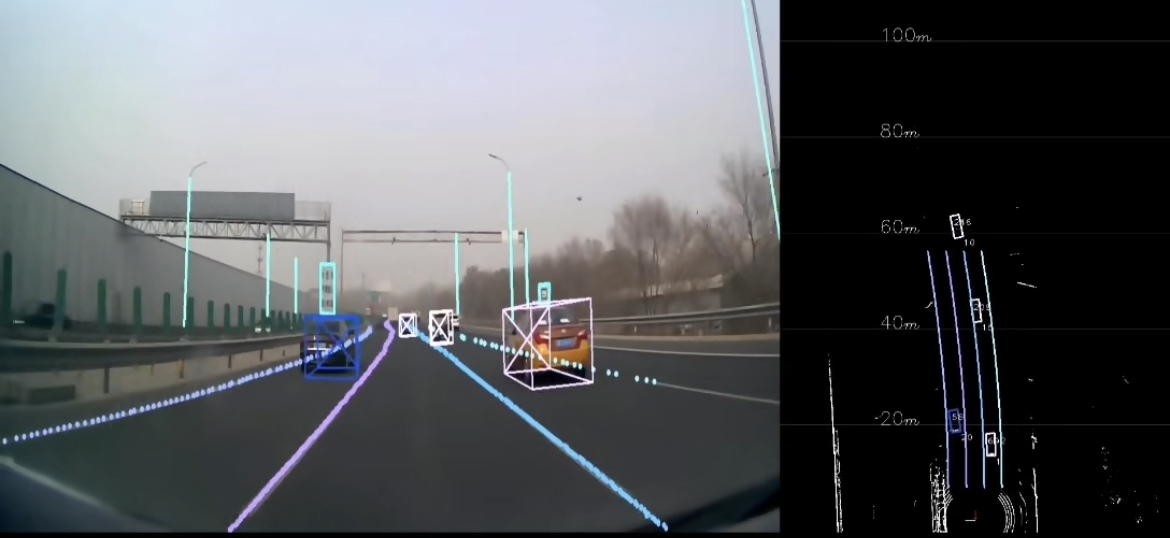
这篇主题发言的摘要中提及,随着智能驾驶落地应用场景不断延展,系统信息表达的确切度规定进一步提高。一个合格的智能驾驶系统,需要精确表示包含道路布局、车道结构、道路使用者等元素构成的周边环境。然而,物体的距离、场景的深度信息在2D感知结果上并不能受到有效呈现。这些信息才是智能驾驶系统对周边环境进行恰当判断的关键。因此,3D画面感知才是智能驾驶视觉认知的优选。
最近,基于多角度摄像头的3D目标检测在鸟瞰图下的感知(Bird's-eye-viewPerception,BEVPerception)吸引了越来越多的注意力。一方面,将不同角度在BEV下统一与表征是很自然的表述,方便后续规划控制组件任务;另一方面,BEV下的物体没有图像角度下的尺度和遮挡问题。如何优雅地受到一组BEV下的特点描述,是增加测试性能的关键。
代季峰团队强调BEVFormer环视感知的新框架,通过使用时空注意力措施学习用以支撑多种自动驾驶任务的航拍图视角下的环境表征。总体而言计算机视觉系统,BEVFormer通过使用预定义的格栅化的鸟瞰图查询来与时间和空间特性进行交互,从而获得时空信息。为了聚合空间信息,设计了一种空间交叉注意力措施,每个鸟瞰图查询在镜头角度下的相关区域提取空间特性。对于时序信息,提出时序自注意力措施从历史鸟瞰图特点中获得所需时序特性。在nuScenes数据集上超过了56.9%NDS,比之前的最好效果高了9.0%NDS。

转载原创文章请注明,转载自设计培训_平面设计_品牌设计_美工学习_视觉设计_小白UI设计师,原文地址:http://www.zfbbb.com/?id=3308